Water jet loom electronic let-off system
The electronic warp let-off of the water-jet loom can cooperate with the winding mechanism according to the tension and weft density of the fabric. During the weaving process, the warp yarns of the set length are sent out synchronously, thereby ensuring constant tension of the warp yarn system to successfully complete the weaving. Electronic let-off generally consists of a tension detection part, a control part and a transmission part. (1) The tension detection part generally consists of the back beam of the loom, a tension detector and a computer. When the rear beam swings, the tension rod is displaced, which puts pressure on the tension sensor. The tension sensor converts the deformation force of the tension rod into an electrical signal that changes correspondingly with the warp tension, and inputs the signal to the computer. The computer processes several collected signals to calculate the average tension, and compares this value with the predetermined tension value as the basis for the let-off of the next cycle, thereby determining the amount of rotation of the weaving shaft. (2) The control part generally consists of the above-mentioned computer and servo driver. The computer’s display screen can display the actual tension data and tension setting value of the warp let-off system, and the keyboard can be used to set and correct the corresponding data. After receiving the instructions from the computer, the servo driver processes the signal and amplifies the signal sent by the computer into a corresponding power signal to drive the servo motor, thereby completing the control of the let-off actuator. When the warp tension is too large or too small, the control part will immediately send out an alarm signal and stop command. (3) Transmission part The transmission part consists of servo-driven power components, servo motors and reduction gearboxes. Its rotational speed and steering changes are controlled by changes in the input signal (i.e., tension signal). The servo motors of water-jet looms generally adopt AC servo motors, and use a closed-loop control system to ensure the linear characteristics of the warp let-off. (4) Operation and use At present, foreign water-jet looms have generally been equipped with electronic let-off systems, such as various models of Toyota and Tsudakoma looms. Among domestic products, the electronic let-off device of the JWG4762 water-jet loom produced by Shenyang Hongda Textile Machinery Company has begun to be used. The use and operation of the electronic let-off device of the JWG4762 water-jet loom is mainly accomplished by using the display interface and operation keys. The structure of the operation interface is shown in Figure 3-56. 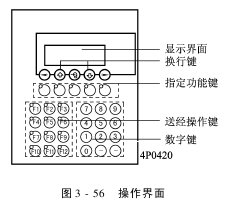 1. Function description Specified function keys: from left to right are let-off monitoring and let-off setting , let-off adjustment and let-off compensation. Warp let-off operation key: F1——Tension recovery. F2——tension zero calibration. F3——driven curling. F4——Forward let-off. F5—— Terminate the operation. F6——Reverse let-off. F11——Chain button. F8+F10+F12——operating mode switching, only allowed to operate on the “warp let-off monitoring” operating screen. 2. Description of designated function keys: Let-off monitoring: displays basic information and working status. Warp let-off setting: setting of basic parameters. Warp let-off adjustment: Parameter settings for removing weft rails. Warp let-off compensation: adjust the dense gear. (5) Other electronic let-off devices In addition to the aforementioned electronic let-off devices, there are also CE electronic let-off devices and A.V.R electronic let-off devices. Most of these devices use high-performance 16-bit CPUs and A/D converters, which can control tension with high precision. Various settings can be made through the LCD display and touch buttons, and it has an external display interface. Its basic characteristics are as follows: When the loom is restarted after stopping, in order to avoid the occurrence of thin gear, the cloth fell can be controlled at the appropriate position. You can first conduct an inversion test according to the type of fabric to find the best data. This amount of inversion can be adapted to the stop. The length of time is divided into 7 stages to set. The unique design makes the warp tension have nothing to do with changes in the diameter of the warp beam, ensuring that the warp tension is always in a constant state. The servo motor can accelerate from 0 to 3000r/min in 1/100s. Forward rotation and reverse rotation amount: 0~110mm. Warp roll setting (when changing the beam) 15 ≤ warp beam diameter ≤ 100. The pre-flow working diagram is shown in Figure 3-57.
1. Function description Specified function keys: from left to right are let-off monitoring and let-off setting , let-off adjustment and let-off compensation. Warp let-off operation key: F1——Tension recovery. F2——tension zero calibration. F3——driven curling. F4——Forward let-off. F5—— Terminate the operation. F6——Reverse let-off. F11——Chain button. F8+F10+F12——operating mode switching, only allowed to operate on the “warp let-off monitoring” operating screen. 2. Description of designated function keys: Let-off monitoring: displays basic information and working status. Warp let-off setting: setting of basic parameters. Warp let-off adjustment: Parameter settings for removing weft rails. Warp let-off compensation: adjust the dense gear. (5) Other electronic let-off devices In addition to the aforementioned electronic let-off devices, there are also CE electronic let-off devices and A.V.R electronic let-off devices. Most of these devices use high-performance 16-bit CPUs and A/D converters, which can control tension with high precision. Various settings can be made through the LCD display and touch buttons, and it has an external display interface. Its basic characteristics are as follows: When the loom is restarted after stopping, in order to avoid the occurrence of thin gear, the cloth fell can be controlled at the appropriate position. You can first conduct an inversion test according to the type of fabric to find the best data. This amount of inversion can be adapted to the stop. The length of time is divided into 7 stages to set. The unique design makes the warp tension have nothing to do with changes in the diameter of the warp beam, ensuring that the warp tension is always in a constant state. The servo motor can accelerate from 0 to 3000r/min in 1/100s. Forward rotation and reverse rotation amount: 0~110mm. Warp roll setting (when changing the beam) 15 ≤ warp beam diameter ≤ 100. The pre-flow working diagram is shown in Figure 3-57. 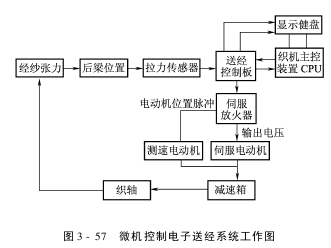
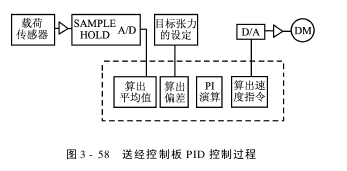
The PID control process of the let-off control panel is shown in Figure 3-58. It uses a single-chip microcomputer system to detect the process y through the A/D circuit, and calculates the error e=u-y and the manipulated variable u, and outputs it to the actuator (servo motor) through D/A conversion to stabilize the process variable y at the set value. . This operation calculates the manipulated variable u based on the error value at the sampling time, and is a sampling operation.
AAADFGTEHTRY
Disclaimer:
Disclaimer: Some of the texts, pictures, audios, and videos of some articles published on this site are from the Internet and do not represent the views of this site. The copyrights belong to the original authors. If you find that the information reproduced on this website infringes upon your rights, please contact us and we will change or delete it as soon as possible.
AA